
ロボットプログラミングコースでは、マイクロビットでロボットを動かすためのプログラミングをしています。
下の動画は自分たちの作ったコースでロボットレースをしたときの様子です。
マイクロビットを搭載したロボットをマイクロビットのコントローラーで操作していますが、ついつい力が入って動かし方が大きくなりすぎると、思ったように動いてくれずにロボットどうしがクラッシュしたりして操作に苦労していました。
そして、センサーを活用してライントレースと障害物検知に挑戦しました。
今までよりも難易度は上がりましたが、トライアンドエラーを繰り返し、目標を達成することができました。
ライントレースでは光センサーを使ったトレースの仕組みを理解し、モーター基盤への接続とロボットへの取り付けを行い、マイクロビットでプログラミングしました。
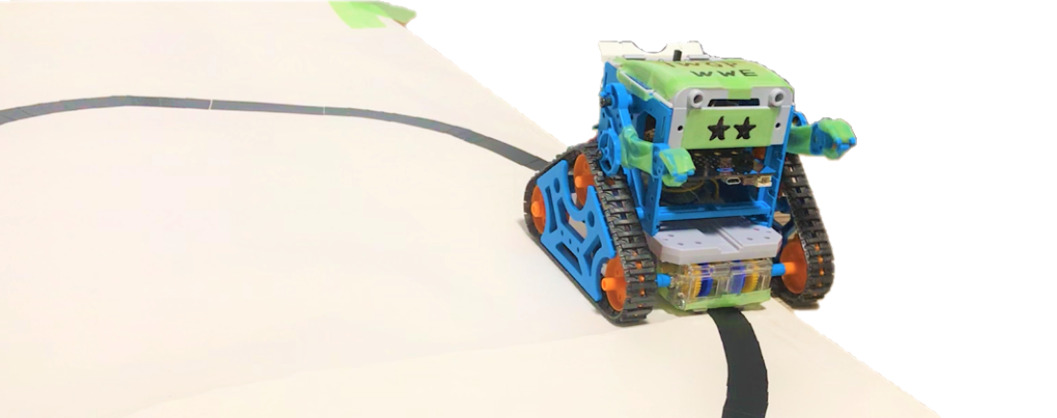
自分たちが試行錯誤で設計した、大きな白い紙に黒いビニールテープで作成したコース上をロボットがうまく走る姿はとても感動です!
障害物検知には赤外線距離センサーを搭載し、前方に壁があるとぶつからずに回避するプログラミングをしました。
障害物までの距離によってセンサーの出力値が変わるので、データを記録し平均値を出し、それをもとにプログラミングを行いました。
この仕組みは、自動車の衝突被害軽減ブレーキ(AEBS)や自動運転にも使われています。
ロボットを組み立てるところから始め、マイクロビットで操作し、ついにセンサーを駆使したプログラムで制御することができるまでになりました!

